odayakalife
Search
検索
ダークモード
ライトモード
リーダーモード
About
Oekaki
Tags
Home
❯
Drawing Notes
❯
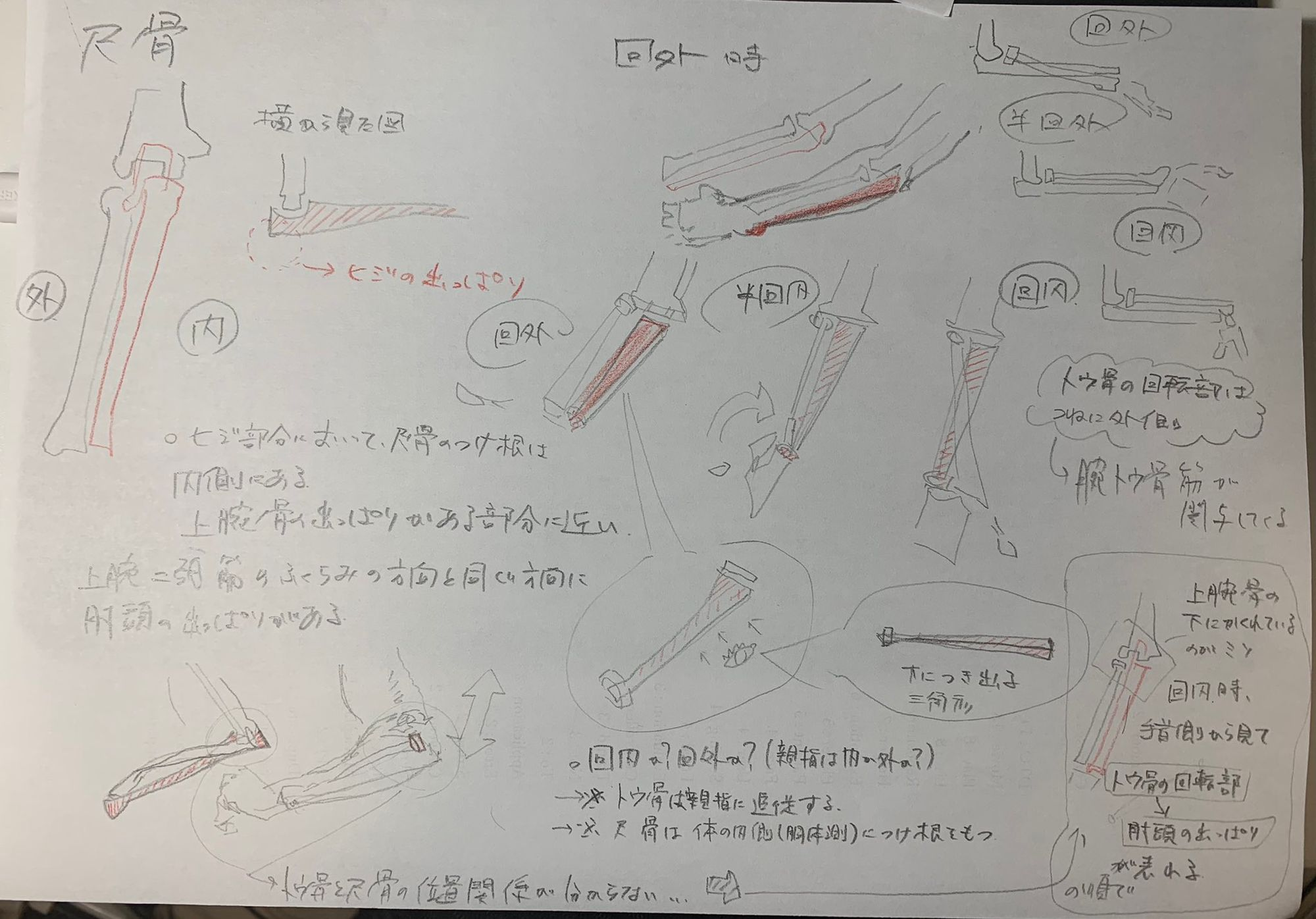
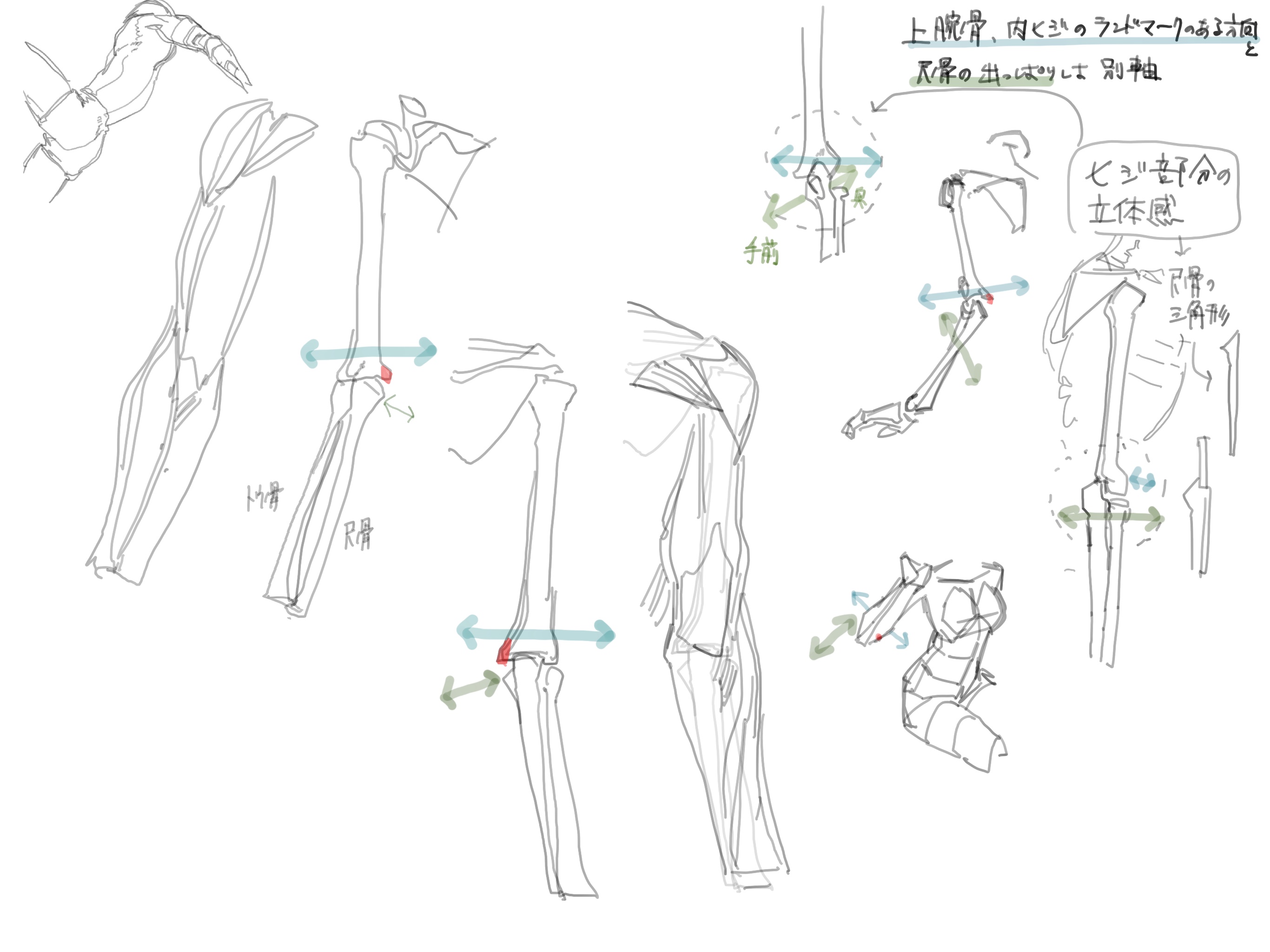
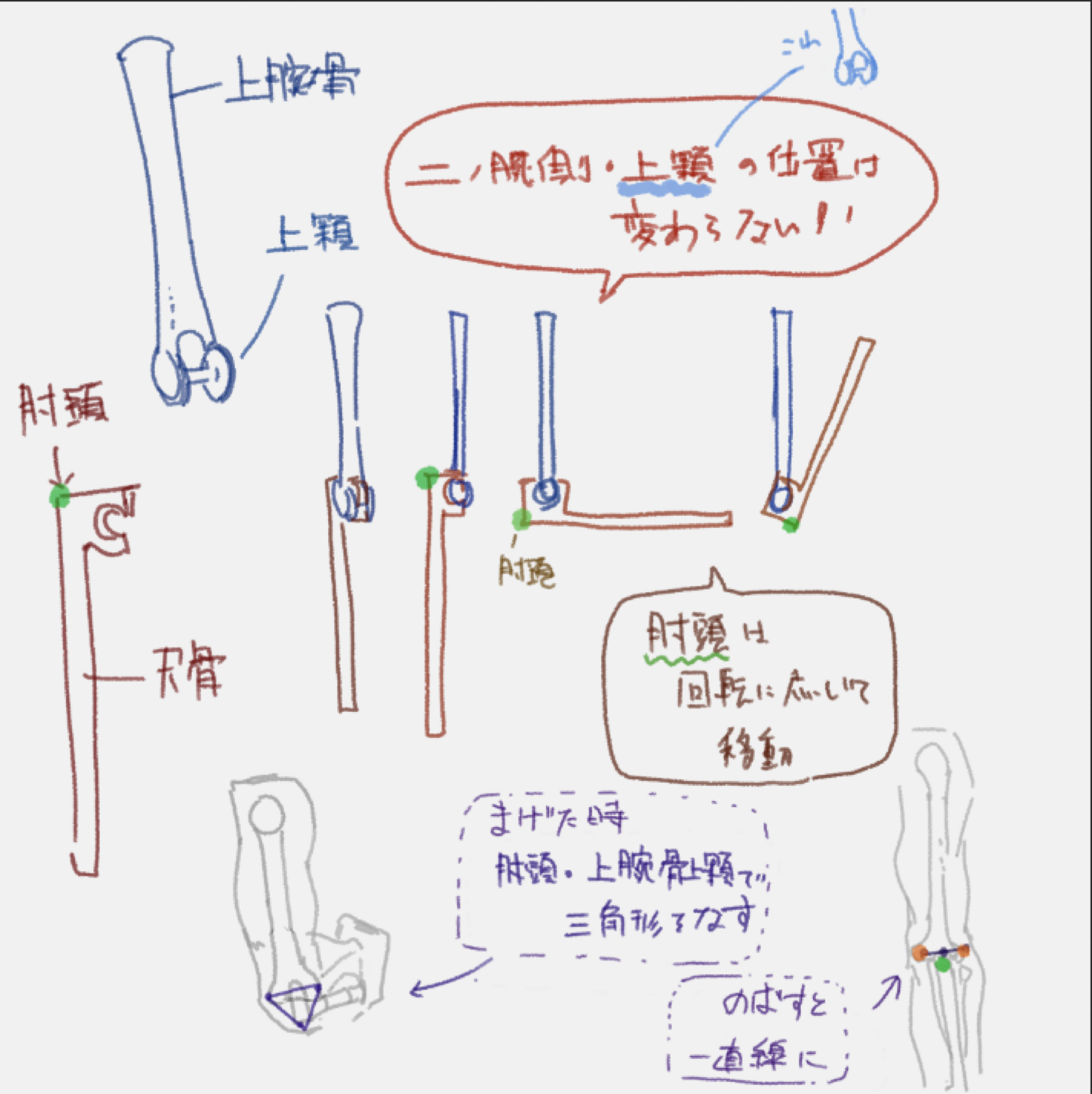
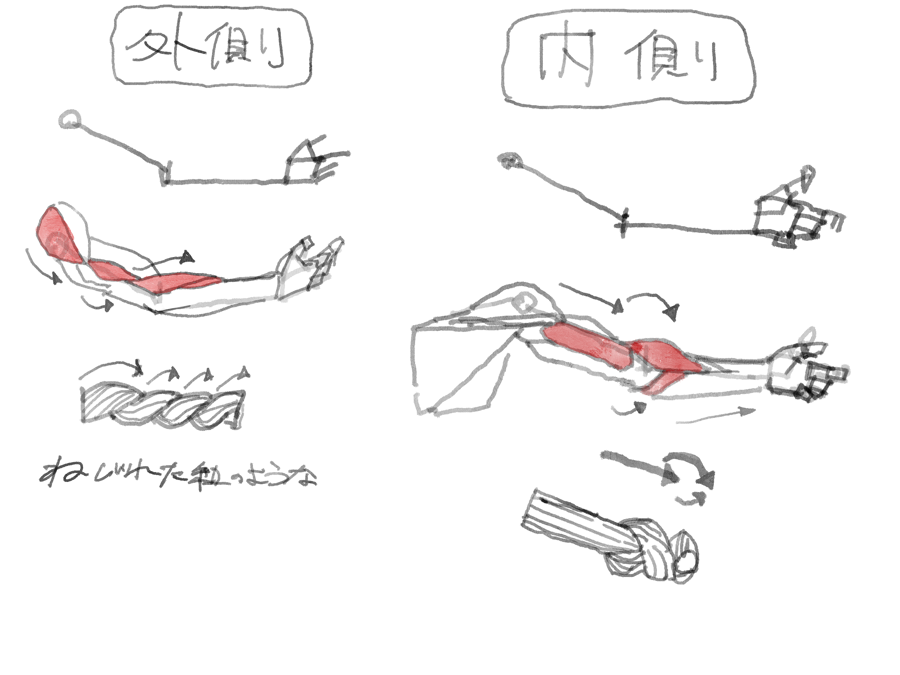
腕
腕
2026年6月18日
0 min read
oekaki/drawing